这里以Stanford机器人为例,说明逆运动学问题的解法。
Stanford机器人的D-H变换矩阵为(参见图5.13-33):
求逆运动学问题时臂矩阵T的各元素是已知的。由 的第四列得W点在定系中的坐标为
的第四列得W点在定系中的坐标为

再从(5.13-23)式右边合成矩阵和 的第四列得W点在第一杆系中的坐标为
的第四列得W点在第一杆系中的坐标为
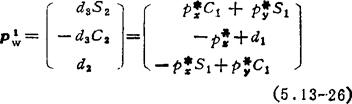
由第三式得  。
。
设 ,于是
,于是 ,
,
解得t,并求出
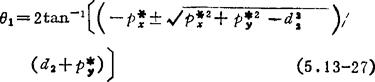
由第一、二式得 /
/ (5.13-28)
(5.13-28)
由第一、二式的平方和得

θ1有双解,θ2因θ1有双解而有双解,d3总大于零,因此负号无意义。下一步求θ4、θ5和θ5。设:

由于θ1、θ2和θ3已知,由此计算出T1,再由(5.136)式计算 。T是给定的,故由(5.13-30)式可计算出T2的诸元素的数值。由于r2=3A44A55A6,左乘:
。T是给定的,故由(5.13-30)式可计算出T2的诸元素的数值。由于r2=3A44A55A6,左乘: ,得
,得 (5.13-31)
(5.13-31)

从(3,3)元素相等,得

由(1,3)和(2,3)元素相等,得

由(3,1)和(3,2)元素相等,得

如果θ4、θ5和θ6都能旋转360°,则θ4、θ5和θ6有双解,其间的关系为

- (二)农业发展和国民经济现代化的关系是什么意思
- (二) 农业发展基金的来源是什么意思
- (二)农业发展展望是什么意思
- (二)农业发展成就是什么意思
- (二)农业发展状况是什么意思
- (二)农业各部门是什么意思
- (二)农业合作化以后是什么意思
- (二)农业合作化和人民公社时期是什么意思
- (二) 农业合作化时期是什么意思
- (二)农业合作化时期是什么意思
- (二)农业合作社时期的粮食分配是什么意思
- (二)农业合作社粮食分配是什么意思
- (二)农业和农村经济发展是什么意思
- (二)农业和农村经济持续快速发展是什么意思
- (二)农业商品出口市场呈现多元化格局是什么意思
- (二)农业固定资产投入不足是什么意思
- (二) 农业土地资源开发条件评价是什么意思
- (二)农业在国民经济中的地位是什么意思
- (二)农业地域类型是什么意思
- (二)农业基地县是什么意思
- (二)农业基本建设投资是什么意思
- (二) 农业基本建设支出是什么意思
- (二)农业基本建设的重点是什么意思
- (二)农业基础设施建设与增长方式转变阶段是什么意思
- (二)农业学大寨对农村经济发展的影响是什么意思
- (二)农业学大寨的教训是什么意思
- (二) 农业学大寨的积极意义是什么意思
- (二) 农业学大寨运动是什么意思
- (二)农业学大寨运动对农村经济发展的影响是什么意思
- (二)农业广播电视学校是什么意思
- (二) 农业技术推广是什么意思
- (二)农业技术推广内容是什么意思
- (二)农业技术推广组织网络是什么意思
- (二)农业技术推广队伍建设是什么意思
- (二)农业技术水平是什么意思
- (二)农业指标是什么意思
- (二) 农业推广组织是什么意思
- (二) 农业支持服务项目是什么意思
- (二)农业机械体系初步形成阶段是什么意思
- (二) 农业机械化发展程度是什么意思
- (二)农业机械化建设不断发展是什么意思
- (二)农业机械化建设稳步发展是什么意思
- (二)农业机械化总动力是什么意思
- (二)农业机械化服务的发展是什么意思
- (二) 农业机械化水平是什么意思
- (二) 农业机械化水平大幅度提高是什么意思
- (二)农业机械化的发展方向是什么意思
- (二) 农业机械化程度提高是什么意思
- (二)农业机械构成是什么意思
- (二)农业机械生产技术水平是什么意思
- (二) 农业机械的技术与安全监督管理是什么意思
- (二)农业机械设备、化肥、农药、塑料薄膜、农用电力的使用量都有相当增长是什么意思
- (二)农业气候资源调查和农业气候区划是什么意思
- (二)农业法规教育是什么意思
- (二)农业物质费用产值率是什么意思
- (二)农业物资及设备进口是什么意思
- (二) 农业特产税是什么意思
- (二)农业特产税是什么意思
- (二)农业环境保护发展历程是什么意思
- (二)农业环境保护的主要成绩是什么意思