按机器人主体机构的坐标形态,主要有直角坐标型圆柱坐标型、极坐标型、多关节型和SCARA等类型。
例5.2-217 圆柱坐标型(θSS)
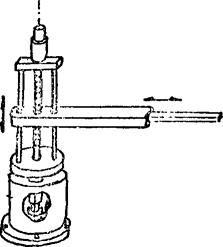
该机构由水平回转θ、上下移动S和大臂伸缩S三个关节构成。常作为搬运机器人的主体机构。
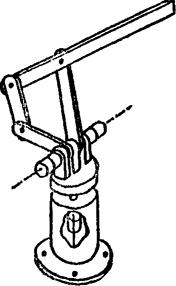
例5.2-218 极坐标型(θθS)
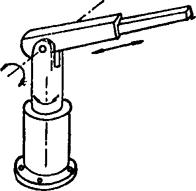
该机构由水平回转θ、俯仰摆动θ和大臂伸缩S三个关节构成,常作为焊接、喷涂机器人的主体机构。
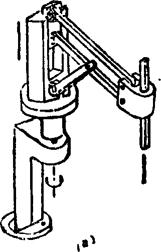
例5.2-219 SCARA型
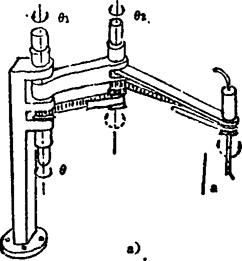
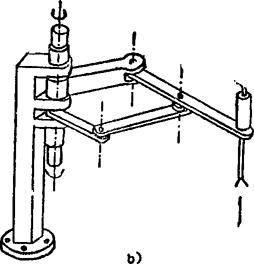
该机构由两个(或三个)水平转动θθ和一个铅直移动S三个(或四个)关节构成。为减轻臂部重量,可引入带传动(如图a)或连杆机构传动(如图b).常作为装配机器人的主体机构。
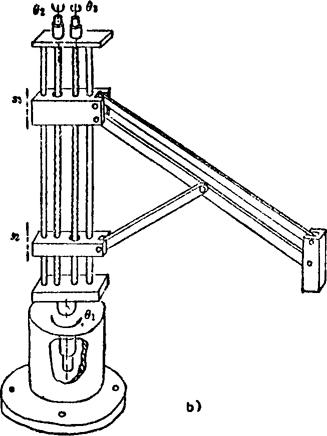
例5.2-220 多关节型(θθθ)
该机构由1个水平转动关节θ和铅直面内的2个转动关节θθ构成。铅直面内的2个转动关节引入连杆机构传动,可有效地减小动作惯性。
例5.2-221 平行连杆式“入”型
如图所示,在传动系统中引入了平行四边形机构。将驱动电机安装在立柱附近,有利于减小动作惯性。常作为装配机器人的主体机构。
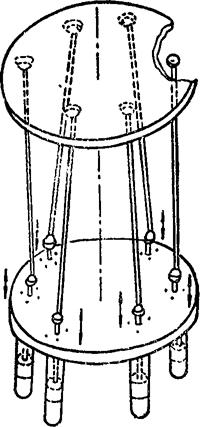
例5.2-222 6-SPS空间多闭环机构
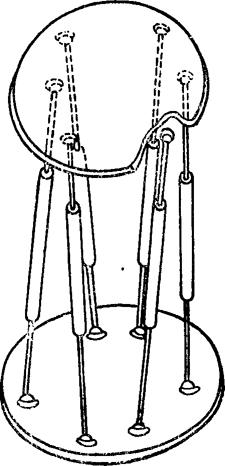
如图示,上下两平台间由6根可变长杆分别以球面副相联接。杆长的变化由液压缸的伸缩来实现。该机构具有6个自由度,由6个驱动缸控制输出端的三维位置变化和三维姿态变化。
例5.2-223 6-PSS空间多闭环机构
如图示,下平台与6个平行安装的驱动缸构成移动副,6根定长杆分别与上平台和驱动活塞杆以球铰副相联接。该机构具有6个自由度,上平台的三维位置变化和三维姿态变化由6个驱动缸的的协调伸缩来控制。与前例相比,该机构的特点是,6个驱动缸全部安装在机座上,可降低动作惯性,易避免结构干涉。
例5.2-224 空间多闭环腕部机构
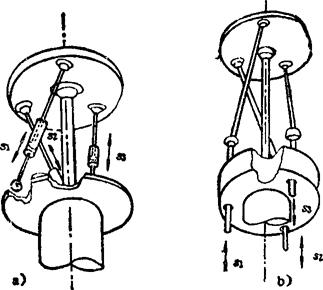
图a)、b)分别为3-SPS型、3-PSS型。其中间杆的一端与臂刚性固连,另一端与手部平板以球面副相联接。两机构均为3个自由度,分别由三个驱动缸的伸缩控制手部的三维姿态变化。
- 6.燕山山麓平原玉米、花生、麦稻区是什么意思
- 6.父母是什么意思
- 6.牙是什么意思
- 6. 物资流通领域的劳动性质是什么意思
- 6. 特区市场和国内外市场的价格关系是什么意思
- 6.特种医学是什么意思
- 6.猴拳是什么意思
- 6.玉器是什么意思
- 6.玉米是什么意思
- 6. 王夫之评论是什么意思
- 6.王瑶水库是什么意思
- 6. 理论价格应按盈利率还是利润率计算是什么意思
- 6.甘肃省农业科学院旱地农业研究所是什么意思
- 6.甘肃省林业勘探设计研究院是什么意思
- 6.甘蓝型双低油菜青油14号是什么意思
- 6. 生产关系的内涵是什么意思
- 6. 生产力的因素是什么意思
- 6.生育是什么意思
- 6-甲泼尼松龙是什么意思
- 6.电子乐器是什么意思
- 6.电子计算机是什么意思
- 6.电影制片厂是什么意思
- 6.电视台、电视工作人员及电视组织是什么意思
- 6. 留坝县是什么意思
- 6.畜产品加工是什么意思
- 6.畜牧业是什么意思
- 6.畜牧业产值占农业总产值的比重是什么意思
- 6.畜牧机械是什么意思
- 6.病例是什么意思
- 6. 盈江县是什么意思
- 6 盘问烟铜是什么意思
- 6.相貌与身材是什么意思
- 6. 眉县是什么意思
- 6. 睢县是什么意思
- 6.知韵是什么意思
- 6. 石屏县是什么意思
- 6. 石林风景名胜区是什么意思
- 6. 石门县是什么意思
- 6.矿产资源分布不均,相对贫乏是什么意思
- 6. 砀山县是什么意思
- 6.破釜沉舟是什么意思
- 6.碘缺乏病是什么意思
- 6-磷酸葡萄糖脱氢酶缺乏症是什么意思
- 6-磷酸葡萄糖脱氢酶缺陷性贫血是什么意思
- 6. 社会主义全民所有制的形式是什么意思
- 6. 社会主义公有制经济中的劳动力是不是商品是什么意思
- 6. 社会主义税收存在的客观依据是什么意思
- 6.社会安保是什么意思
- 6.社会支援是什么意思
- (6)社会组织是什么意思
- 6. 祁连林场是什么意思
- (6)祖国统一是什么意思
- 6. 福鼎市是什么意思
- (6)离合器、制动器等是什么意思
- 6.种子储备是什么意思
- 6.科技兴牧是什么意思
- 6.积石山保安族东乡族撒拉族自治县是什么意思
- 6.稻田养鱼是什么意思
- 6. 第三产业划分的标准是什么意思
- 6. 第二种涵义的社会必要劳动是否决定商品价值是什么意思