采用分析法设计平面连杆机构,需先建立机构参数与运动条件之间的关系式,然后根据关系式采用不同的数学方法(如向量、复数、矩阵、旋量等),按一定的准则,求解满足给定运动条件的机构未知参数。这里将介绍位移矩阵设计法和复数封闭环设计法。
3.2.1 刚体导引机构的设计
1.位移矩阵设计法
如图5.4-19所示,当平而刚体S由位置S1运动到位置Sj,若已知基点P的位置坐标(pjx、Pjy)及标线PQ的对应位置角θj,则根据线性代数待求点Q的位置可表示为:
四、五个位置设计:给定连杆四个位置,设计R-R导引杆时,式(5.4-8)和(5.4-9)中的j=2,3、4,于是可得方程组:
2.复数封闭环设计法
图5.4-24所示为一平面铰链四杆机构在位置1(实线)和任一位置j(虚线,j=2,3,……)的两个不同位置。图中各杆均以向量表示,整个四杆机构可以看作是两个双向量(即标准形)组成Z1-Z2和Z3-Z4。其中Z2和Z4同属连杆平面。在设计中,这四个向量确定了,圆点A、B和圆心点OA、OB即随之确定。另两向量Z5和Z6也可由下式求得
Z5=Z2-Z4 (5.4-20)
Z6=Z1+Z5-Z3 (5.4-21)
对于双向量 来说,其位置1和任一位置j均构成闭环OAAjPjOP1AOA,可写出闭环复数方程
来说,其位置1和任一位置j均构成闭环OAAjPjOP1AOA,可写出闭环复数方程
Z1eiφj+Z2eiajR-j+R1-Z2-Z1=0
(5.4-22)
或Z1(eiφj-1)+Z2(eiaj-1)=δj (5.4-23)
式中,δj表示连杆平面上点P从P1(位置1)到Pj(位置j)的位移向量。若P1和Pj的位置分别以向量R1和Rj表示,则
δj=Rj-R1
式中,φj和aj分别表示向量Z1和Z2从位置1到位置j的转角。
式(5.4-23)称为标准形方程,是一复数方程(或向量方程),分离实部和虚部,可得两个实数方程,能解两个未知实数。另一组双向量Z3-Z4,也可得到类似的标准形方程。
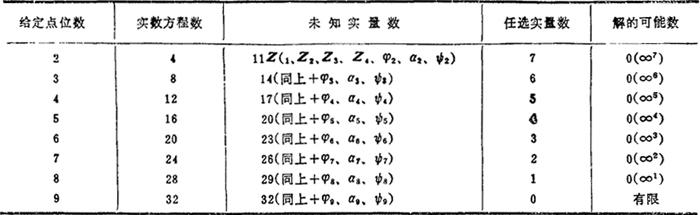
由图5.4-24可知,当给定连杆平面一点(例如P)的位置及其方位角时,则该平面的位置即完全确定。位置设计中给定位置的最大可能数见表5.4-9.表中列有给定位置数、实数方程数、未知实量数、任选实量数和解的可能数之间的关系。
表5.4-9 位置设计给定位置的最大可能数
这是给定运动平面三位置的位置设计,其设计方法和步骤如下:
求四杆机构左侧双向量Z1-22(参见图5.4-24):设φ2=90°,φ2=198°,由式(5.4-27)和(5.4-28)得
3.2.2 传动机构的设计
1.位移矩阵设计法
传动机构的设计即是实现给定函数机构的设计,它按两连架杆给定的若干组对应位置确定机构的设计参数。对该类型机构的设计,通常是转化为实现刚体导引机构的设计。
实现给定函数的传动机构,由于两连架杆的位置关系仅与各杆的相对长度有关,故进行设计时一般选取机架的长度A0B0=1。图5.4-29所示铰链四杆机构,即取固定铰链中心A0为坐标原点,另一固定铰链中心B0的坐标为(1,0)。若将机构的第j个位置BjB0A0Aj看成一刚体,并绕Bo点转过(-ψ1j)=-(ψj-ψ1),使从动连架杆B0Bj与BoB1重合,则机构将由位置BjB0A0Aj转到新的位置 ,即原从动连架杆转化为“机架”,原机架和连杆转化为“连架杆”,而原主动连架杆转化为“连杆”。于是,通过转换机架法,就把按给定位置φj、ψj(j=1,2,……,n)设计实现函数机构的问题,转化为按给定的“连杆n的位置A0A1、
,即原从动连架杆转化为“机架”,原机架和连杆转化为“连架杆”,而原主动连架杆转化为“连杆”。于是,通过转换机架法,就把按给定位置φj、ψj(j=1,2,……,n)设计实现函数机构的问题,转化为按给定的“连杆n的位置A0A1、 (j=1,2,……,n)设计刚体导引机构的问题。因此,利用式(5.4-6)可写出
(j=1,2,……,n)设计刚体导引机构的问题。因此,利用式(5.4-6)可写出 的位置方程式
的位置方程式
例5.4-6 在上例再增加一精确点x1=1,y1=0,试设计近似实现给定函数y=1ogx(1≤x≤2)的铰链四杆机构。〔21〕
四个精确点为:
x1=1 y1=0
x2=1.067 y2=0.0282
x3=1.50 y2=0.1761
x4=1.933 y4=0.2862
对应的转角为:
φ1=φ0+0° ψ1=ψ0+0°
φ2=φ0+4.02° ψ2=ψ0+8.43°
φ3=φ0+30° ψ3=ψo+52.65°
φ4=φo+55.98° ψ4=ψo+85.57°
相对于第一个位置的转角为:
φ12=4.02° ψ12=8.43
φ13=30° ψ13=52.65°
φ14=55.98° ψ14=85.57°
利用牛顿-莱夫森法解非线性方程组的计算机程序进行迭代求解,当预先选定未知量b12=1.35。并不断给b1x以增量0.2时,可得一系列解如下:
(5.4-54)
据此分析给定对应位置的最大可能数与表5.4-9相同,即为五。这样,实现给定函数的传动机构设计问题的解法,就和导引机构的设计完全一致了。其唯一的区别是,这里的已知量是δj和φj,而导引机构的设计则是δj和aj。
值得注意的是,实现给定函数的传动设计只需一个双向量,即图5.4-33中的Z1-Z5。因此,在给定五组连架杆对应位置时,同五位置设计一样,可得4个、2个或零个双向量组,最多也只能得到4个、2个或零个四杆机构。但其中总有一个解没有实际意义,即|Z1|=0、Z5=Z3,因而aj=ψj。可见,五精确点的设计,最多只能得到三个不同的四杆机构。
3.2.3 导向机构的设计
1.位移矩阵设计法
图5.4-34所示为铰链四杆机构A0A1B1B0。设连杆AB上一点P在坐标系xoy中,沿平面轨迹的一系列给定的有序点P1、Pj(j=2、3、4……)运动。由于Pj点的坐标(Pjx、pjy)为已知,故需确定四个铰链中心A0、A1、B0、B1的坐标。为此,可列出两连架杆的约束方程:
2.复数封闭环设计法
按图5.4-24所示,四杆机构左右两侧双向量的标准形方程为

在轨迹设计中,仅已知连杆上P点的位置,即式(5.4-67)中δj是唯一的已知量,其余均为未知量。由于式中Z2和Z4同属连杆平面,其转角aj相同,因此由一式求得aj后,将其代入另一式中即为已知量。为此,轨迹设计时应将两侧的标准形方程结合在一起予以讨论。
仿效导引机构设计的分析方法,按式(5.4-67)分析实现轨迹的导向机构设计给定精确点位的最大可能数见表5.4-12。由表可知,给定轨迹精确点位的最大可能数为9。当进行9个精确点的轨迹设计时,需联立求解32个超越方程式。然而,连架杆的转角φj和ψj在设计中并非必求不可。如果将其舍弃,则未知实量数可减少一半,联立方程的总数减为16个,可用开环法按二连架杆长不变建立约束方程。即使如此,求解仍然相当困难。因此,通常是减少给定的精确点位数,任选某些未知量,以简化联立方程组的求解。
表5.4-12 轨迹设计给定精确点位的最大可能数
另一种方法,是按同时给定轨迹上的精确点位Pj和相应的输入杆转角φj进行设计。仿前分析式(5.4-67)可知,此时给定精确点位的最大可能数与位置设计相同(也是五个),方程组的解法也基本一致。这时,就已知量和未知量而言,双向量Z1-Z2的标准形方程与函数设计的方程相同,而双向量Z3-Z4的标准形方程则与位置设计的一样,两者的解法在本质上无差异,只是后者需待前者求得aj之后再求。
- 财会制度是什么意思
- 财会员手册是什么意思
- 财会知识手册是什么意思
- 财会税收实用大全是什么意思
- 财力是什么意思
- 财力是什么意思
- 财力是什么意思
- 财力经济学是什么意思
- 财力资源管理是什么意思
- 财务是什么意思
- 财务是什么意思
- 财务是什么意思
- 财务是什么意思
- 财务是什么意思
- 财务是什么意思
- 财务是什么意思
- 财务是什么意思
- 财务是什么意思
- 财务代理协议是什么意思
- 财务会计是什么意思
- 财务会计是什么意思
- 财务会计是什么意思
- 财务会计是什么意思
- 财务会计是什么意思
- 财务会计是什么意思
- 财务会计是什么意思
- 财务会计是什么意思
- 财务会计是什么意思
- 财务会计学是什么意思
- 财务会计审计常用术语大全是什么意思
- 财务会计审计计算知识大全是什么意思
- 财务会计手册是什么意思
- 财务会计手册是什么意思
- 财务会计报告概述是什么意思
- 财务会计报告的分类是什么意思
- 财务会计报告的构成是什么意思
- 财务会计报告的编制要求和基本方法是什么意思
- 财务会计:通往细枝末节之路是什么意思
- 财务信息编制是什么意思
- 财务公司是什么意思
- 财务公司是什么意思
- 财务公司是什么意思
- 财务公司是什么意思
- 财务公司业务范围是什么意思
- 财务公司危机是什么意思
- 财务公司设立条件是什么意思
- 财务公司设立申报材料是什么意思
- 财务内部收益率审计是什么意思
- 财务决策是什么意思
- 财务决策是什么意思
- 财务决策是什么意思
- 财务决策手段是什么意思
- 财务决策的任务与类型是什么意思
- 财务分析是什么意思
- 财务分析是什么意思
- 财务分析是什么意思
- 财务分析是什么意思
- 财务分析是什么意思
- 财务分析是什么意思
- 财务分析是什么意思