控制理论control theory
研究系统控制和动态一般规律的学科,动态指系统的行为随时间而变化的现象,常用一些适当的作为时间函数的变量来描述。
早期的控制理论多是研究单输入、单输出的线路系统,关心的问题主要是稳定性、响应速度、频率特性等问题。20世纪50年代末以后,注意力转向多输入、多输出系统(线性的或非线性的)的研究,理论上取得很大进展,这些成果称为现代控制理论,而将早期的理论称为古典控制理论。现代控制理论还可用来描述一般复杂系统,为系统理论提供理论基础。
控制理论不直接研究现实的具体系统,而是用数学方法讨论几类典型系统的模型。因此,应用控制理论的结果不受系统物理特性的局限。
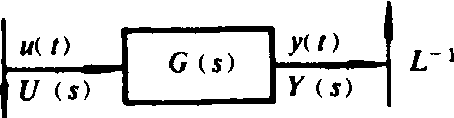
图1 外描述和传递函数的导出
古典控制理论 其基本方法是所谓外描述方法。即从系统的输入u(t)和输出y(t)的关系来描述系统的性质和作用,而不考虑系统的内部状态,所以又称为黑箱方法(图1)。把系统的作用看作一种变换,即系统将u(t)变换为y(t)。一般情况下,很难用简单方法表示这两个时间函数间的变换。在控制工程中多以拉普拉斯变换(简称拉氏变换)为媒介,求出一种称为传递函数的复变函数,以它作为系统的模型来表示系统。此法适用于线性系统,尤其适合单输入、单输出情形。拉氏变换及其逆变换是一种积分变换:
传递函数 令Y(s)=£〔y(t)〕,U(s)=£〔u(t)〕,设其中有关的初值为零,以下式定义传递函数G(s):

过渡(暂态)响应和稳态响应 输出y(t)一般是随时间而趋于零的和趋于常数(或某个函数)的两部分函数之和,前者称为过渡响应,后者称为稳态响应。在实际问题中,后者是我们预期的。一般希望过渡时间短,称为速应性。但不能过快,否则带来其他损害。因系统可能承受的输入随具体情况而异,其响应也各异,难于一一讨论。所以,实用中常讨论几种典型的简单输入函数作用下的响应。常用的U(t)函数有单位冲量函数σ(t)、单位阶跃函数l(t)和单位斜坡函数t。其中,σ(t)函数的响应称为单位冲量响应,记做g(t)。可以证明g(t)=L-1〔G(s)〕,所以它也被看作系统的模型。而且,传递函数为G(s)的系统对于任意输入u(t)的响应y (t)可由下式给出:

框图 较复杂系统常由若干子系统构成,其间的关系和结构可用框图表示,即以方框代表各子系统(它们本身则以各自的传递函数表示),以箭头表示其间以及它们与环境的输入和输出函数。框图的基本形式有串联、并联和反馈。系统则是这三种形式的组合(图2)。图中以小圆圈表示求代数和。容易证明上述三种复合系统(各含二子系统)的传递函数为:❶串联G1(s)G2(s),
❷并联G1(s)+G2(s),
❸反馈G1(s)/〔1+G1(s)G2(s)〕。多次应用类似推导可根据框图求出任何复合系统的传递函数,从而求出其响应。
频率响应 正弦函数输入时系统的稳态响应。设u(t)=Asinωt,A为振幅(常数),ω为角频率。系统的稳态响应为M(ω)Asin〔ωt+ψ(ω)〕。M(ω)为ω的函数,是振幅放大倍数,ψ(ω)也是ω的函数,是位相差。M、Φ与ω的关系可以方便地用奈奎斯特(Nyquist)图或波特(Bode)图表示。由这些图得到一重要结论:惯性系统的频率响应都具有低通性质,即ω高于某一频率(称为截止频率)时M(ω)将很小,即输出信号微弱到可以忽略。M、ψ对于控制系统的设计很重要。
稳定性 系统抗干扰的能力。严密地说,有几种不同意义的稳定性,这里仅述渐近稳定性。即设系统原来处于某个稳态或平衡状态(即无干扰时可以长久保持的状态),但因受外界的瞬时干扰而偏离此态。其后如系统能在t→∞时趋于原来的平衡态,则称系统是渐近稳定的。渐近稳定性是一个由系统本身决定的性质,不依赖于输入,它依赖于系统的特征方程的根。设系统可用一微分方程描述,其相应的特征方程的根如全具有负的实部,则系统稳定,特征方程(代数方程)的次数称为系统的阶,可表示系统行为的多样性。控制、调节的重要目的之一是增进、改善系统稳定性。
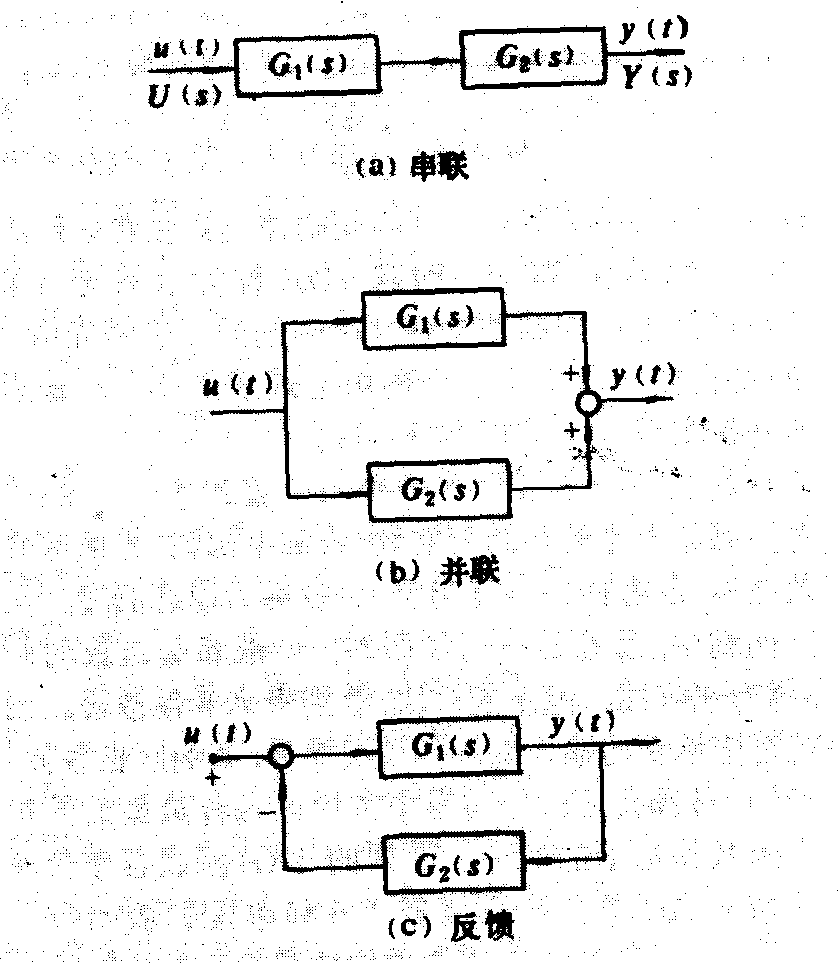
图2 框图的三种基本形式
现代控制理论 其基本方法是所谓内描述方法。即以状态变量(一般是向量)描述系统的内部并以状态方程表示状态变化与现在状态及输入的关系,同时以输出方程表示输出与状态、输入的关系。令X(t)=〔X1(t),X2(t),…,Xn(t)〕T为状态向量,其每一分量表示系统内部的一个特征。例如,令Xi(t)表示一生物种群在时刻t的i龄生物个体数,则X(t)表示此种群各龄生物的一种状态(见生态学模型)。显然,诸分量Xi(t)应互相独立,而分量的总数n应足够确定系统的状态。令U(t)=〔u1(t), u2 (t),…, um(t)〕T为输入向量,Y(t)=〔y1(t),y2(t),…,yr(t)〕T为输出向量,则有:
状态方程 X(t)=AX(t)+BU(t),X(0)=X0
输出方程 Y(t)=CX(t)+DU(t)式中 A、B、C、D为具有相应阶的矩阵。如它们都是常数元素的矩阵,则上式描写的是线性定常(或称非时变)系统,如这些阵的元素是时间函数,则为时变线性系统。非线性系统的状态方程之右端为X、U的非线性函数。A称为系统阵,描述系统的结构,由状态方程可看出: 多输入、多输出系统的各状态分量之间常是交互影响的,输入向量的每一分量可能对各状态分量都发生作用,而输出向量的各分量则可能由几个状态分量决定。
状态方程的解 上述描述的非时变系统由下式给出其解:
❷拉氏变换法;
❸矩阵对角化方法等。时变系统解的形式与上述解相同,但其状态转移矩阵的求法较繁。
上述各式皆属于连续时间情形,即各变量为时间的连续函数。在生物、生态、经济问题中多用离散时间形式描述。此时状态方程取差分方程形式:
X(k+1)=AX(k)+BU(k),
X(0)=X0,k=0,1,2,…
Y(k)=CX(k)+DU(k)
对于时不变情形,其解为:
能控性和能观性 现代控制理论的重要概念,也是多输入、多输出系统的特殊问题。就线性连续时不变系统而言,如果存在一控制U(t)能在有限时间内把系统从其初态X0变到任意终态X(tf),tf表示终止时刻,则称此系统是能控的。如对于任意的初态,系统皆有此性质, 则它是完全能控的。能控性不决定于控制向量, 而决定于系统本身。能观性则表示用输出Y(t)推测状态X(t)的能力,如果根据有限时间内对Y(t)的观测能确定系统的初态则称系统是能观的。如果对于任意初态,系统皆有此性质,则称系统是完全能观的。显然,此性质也仅由系统本身决定。设状态变量是n维的向量,则有以下条件:
完全能控性充要条件
rank〔B AB A2B…An-1B〕=n
完全能观性充要条件
线性确定性离散系统的这两个条件与上式形式相同。
状态反馈和观测器 图2所示的反馈是将输出信号反馈到输入端,称为输出反馈。这种反馈不完善,因输出一般只反映了一部分状态分量的信息。理想的方法是状态反馈,即把各状态分量的信号都反馈到输入端。反馈的目的是改进性能和保证系统稳定。但这在实践上常难于实现,很多系统的内部难于接近和进行测量。所以用观测器根据U(t)和Y(t)信号对X(t)进行估计,以其估计值
 代替X(t)进行反馈。
代替X(t)进行反馈。就理论而言,实现观测的条件是系统完全能观。在实际构造观测器中,重要的是求出适当的反馈阵,以使(
 -X)和(
-X)和( -Y)随时间趋于零。
-Y)随时间趋于零。最优控制 允许控制集合的一个控制函数U*(t),它驱使状态在状态空间内沿“最优”的轨道X*变化而达到使给定的性能指标取最优值的目的。其求解之难度因性能指标的形式和约束条件而异。常用的方法有:❶动态规划法(见数学规划)。
❷变分法。后者是将这个有约束优化问题化为无约束优化问题后求解。其步骤如下:设指标泛函
 此处L表示线性函数。系统的状态方程为X=f(X,U,t),引入辅助变量λT=〔λ1,λ2,…,λn〕并用它构造新的被积函数H(t)=L+λT〔f-X〕及新的泛函
此处L表示线性函数。系统的状态方程为X=f(X,U,t),引入辅助变量λT=〔λ1,λ2,…,λn〕并用它构造新的被积函数H(t)=L+λT〔f-X〕及新的泛函 此处t0tf分别表示过程的初始及终止时刻。由求V的无约束极值得出如下的使J取极值的条件:
此处t0tf分别表示过程的初始及终止时刻。由求V的无约束极值得出如下的使J取极值的条件:欧拉方程
横截条件
❸最大(小)值原理由庞特里亚金(Л.С.Понмряшн)提出,因问题是求性能指标极大或极小而称为最大或最小值原理。应用时先应引入协状态(costate)变量PT=〔P1,P2,…,Pn〕及建立哈密顿函数
 ≜L(X,U,t)+PTf(X,U,t)。下面用*号表示最优,则U*应满足控制方程:
≜L(X,U,t)+PTf(X,U,t)。下面用*号表示最优,则U*应满足控制方程:
max (X*,U,P*,t)=
(X*,U,P*,t)= (X*,U*,P*,t)
(X*,U*,P*,t)
或min (X*,U,P*,t)=
(X*,U,P*,t)= (X*,U*,P*,t)
(X*,U*,P*,t)
稳定性和平衡态 对于状态方程为X=f(X,U)的系统,满足
 =0的状态叫做该系统的平衡态。复杂的系统可能有多个平衡态。而对于线性时不变系统
=0的状态叫做该系统的平衡态。复杂的系统可能有多个平衡态。而对于线性时不变系统 =AX,如A非奇异则只有一个平衡态。在现代控制理论中稳定性包括一致稳定,渐近稳定,大范围渐近稳定和输入一输出稳定等不同概念。对于非线性系统,李雅普诺夫定理可用于研究稳定性。李雅普诺夫函数方法以及将非线性微分方程在平衡态附近做泰勒展开并用其线性项近似地讨论其稳定性的方法皆有应用。
=AX,如A非奇异则只有一个平衡态。在现代控制理论中稳定性包括一致稳定,渐近稳定,大范围渐近稳定和输入一输出稳定等不同概念。对于非线性系统,李雅普诺夫定理可用于研究稳定性。李雅普诺夫函数方法以及将非线性微分方程在平衡态附近做泰勒展开并用其线性项近似地讨论其稳定性的方法皆有应用。最优随机控制 当存在随机干扰时线性非时变系统的模型是:

U*(t)=-R-1BTP(t)X(t)
式中P(t)是下面黎卡提方程的解:
控制理论
当代西方犯罪社会心理学派的主要理论之一,美国犯罪学家赫兹1969年在《青少年犯罪原因》一书中首先提出。该理论认为不愿受约束是人的本性,因而每一个人都在不同程度上受到犯罪的诱惑,但同时也存在着控制人们不实施犯罪的主观或社会环境因素,犯罪的产生是这些因素出现某种缺陷的结果。
控制理论
研究各种系统的控制、调节的一般规律的科学。基本概念是信息概念的反馈概念。见“控制论”。
控制理论
亦称“自动控制理论”、“工程控制论”。把控制理论的基本理论和方法推广运用于工程控制系统,并吸收了控制论出现以前的伺服机构理论的成果形成的关于工程系统的控制理论。其形成较早,理论、方法及应用也比较成熟。人们一致公认,我国学者钱学森于1954年在美国发表的专著《工程控制论》是控制理论的奠基性著作。控制理论的发展经历了三个阶段: (1) 经典控制理论 (20世纪40—50年代)。它的中心问题是控制系统的稳定性; 研究的对象是单输入、单输出的定常的线性系统和简单的非线性系统; 分析方法是传递函数法、频率法等复频域的方法; 设计方法主要是试探法。(2) 现代控制理论 (60—70年代)。它的中心问题是控制系统的最优性; 研究的对象主要是多输入和多输出的、定常的和时变的、线性的和非线性的系统; 分析方法是状态空间法等时域的方法; 设计的方法是在给定系统性能指标前提下的最优设计。(3) 大系统 (控制) 理论(70年代— )。它的中心问题是大系统的最优化;研究对象是规模庞大、结构复杂的各种工程或非工程的大系统; 主要非研究方法是分解——协调法。控制理论的基本内容有: 线性系统控制理论,非线性系统控制理论,最优控制理论,自组织控制理论,系统辨识理论,大系统控制理论、模糊控制理论,等等。控制理论的基本问题是最优控制,即在各种工程及经济的约束条件下,确定最佳控制规律,使给定的性能指标达到极值。它包括两大主题: (1) 系统分析,即在特定的条件下,对数学模型已知的控制系统的性能进行研究。(2) 系统设计与综合,即设计或构造一个系统或系统的某些环节,使其按规定的要求完成给定的任务。控制理论的研究与应用已超出了工程领域,被广泛地应用于社会,经济等其他领域,特别是在经济控制方面的应用比较成熟,取得了很多有价值的成果。
- 㵃是什么意思
- 㵅是什么意思
- 㵊是什么意思
- 㵌是什么意思
- 㵍是什么意思
- 㵎是什么意思
- 㵐是什么意思
- 㵐水是什么意思
- 㵑是什么意思
- 㵒是什么意思
- 㵖是什么意思
- 㵗是什么意思
- 㵘是什么意思
- 㵝是什么意思
- 㵞是什么意思
- 㵟是什么意思
- 㵠是什么意思
- 㵠沱是什么意思
- 㵡是什么意思
- 㵢是什么意思
- 㵣是什么意思
- 㵤是什么意思
- 㵦是什么意思
- 㵧是什么意思
- 㵧㵧是什么意思
- 㵨是什么意思
- 㵩是什么意思
- 㵪是什么意思
- 㵫是什么意思
- 㵬是什么意思
- 㵯是什么意思
- 㵱是什么意思
- 㵲是什么意思
- 㵲水是什么意思
- 㵲溪是什么意思
- 㵲溪书院是什么意思
- 㵲阳书院是什么意思
- 㵲阳县是什么意思
- 㵲阳河三峡风光是什么意思
- 㵲阳河风景名胜区是什么意思
- 㵲阳纪事是什么意思
- 㵳是什么意思
- 㵵是什么意思
- 㵶是什么意思
- 㵷是什么意思
- 㵹是什么意思
- 㵺是什么意思
- 㵻是什么意思
- 㵽是什么意思
- 㵾是什么意思
- 㵿是什么意思
- 㵿淼是什么意思
- 㶀是什么意思
- 㶁是什么意思
- 㶁㶁是什么意思
- 㶄是什么意思
- 㶆是什么意思
- 㶇是什么意思
- 㶉是什么意思
- 㶉㶉是什么意思