开链机构的自由度Fo等于所含各个运动副自由度f的总和,设机构中含有1、2、3、4、5类运动副的个数分别为p1、p2、p3、p4、p5,则开链机构自由度公式为:

开链机构示例见表5.1-4,其中的末杆自由度λ,是指末杆在机架坐标系中可能发生的独立的基本运动数,末杆是开链机构中离机架最“远”的构件,只有1个运动副。末杆自由度不可能多于开链各运动副自由度之和,且最多等于一刚体在三维空间的自由度,即λ≤Σf,且λ≤6,一般可用直观分析法按照下式确定λ值:
表5.1-4 开链机构自由度F0及末杆自由度λ示例
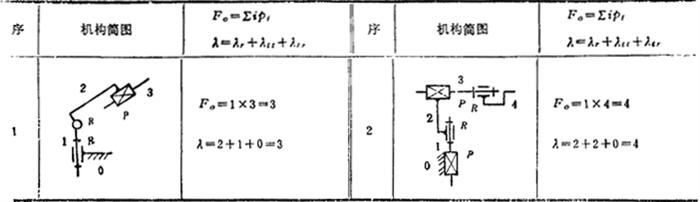
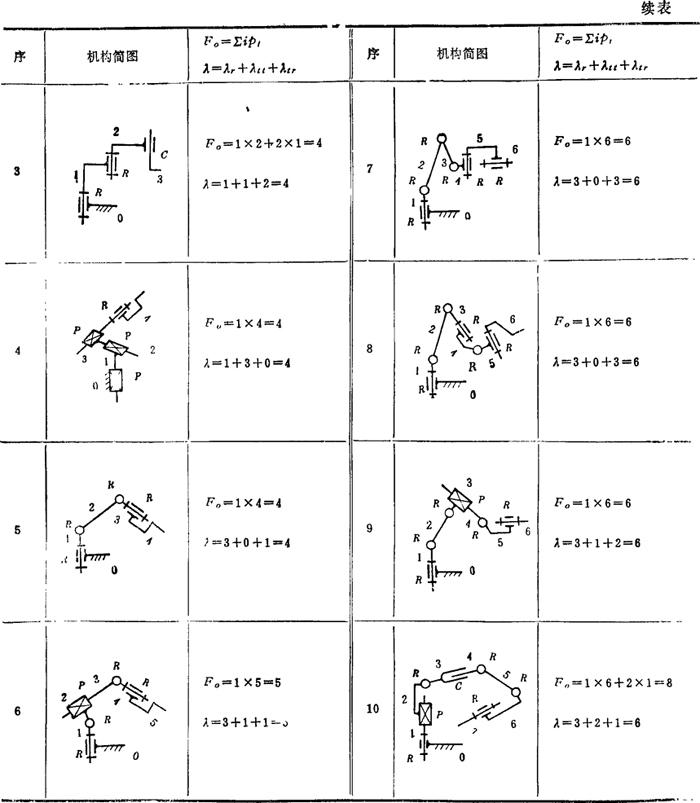
λ=λr+λt=λr+λtt+λtr (5.1-2)
式中λr为末杆转动数;λt为末杆移动数。λt又分为固有移动数λtt和衍生附加移动数λtr。λr、λt、λtt、λtr均最小为0,最大为3。λr、λtt、λt,的直观判定如下:
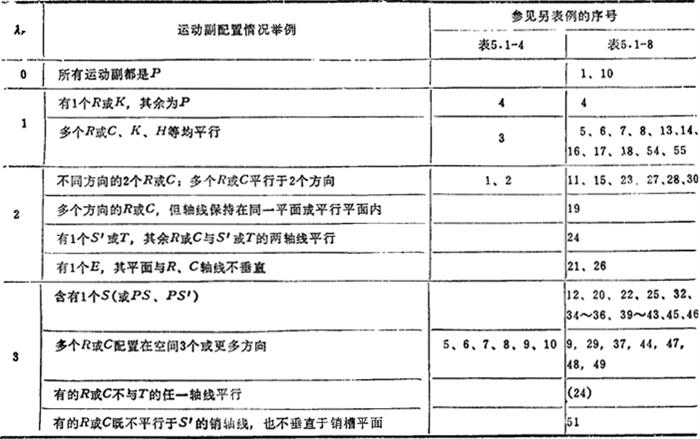
❶ 末杆转动数λr,由开链中的转动副R、圆柱副C、球副S、滑滚副K、螺旋副H……的转动自由度提供。使λr等于0、1、2、3的若干运动副配置情况举例见表5.1-5。
表5.1-5 末杆转动数λr
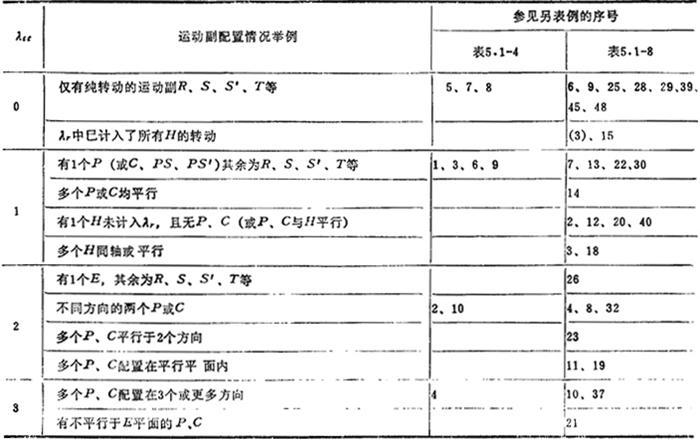
❷ 末杆的固有移动数λtt,由开链中的移动副P、圆柱副C、滑滚副K、螺旋副H……的移动自由度直接产生。若λr中已计入H的转动,则λtt中不再计入移动;反之亦然。使λtt等于0、1、2,3的若干运动副配置情况举例见表5.1-6。
表5.1-6 末杆固有移动数λtt
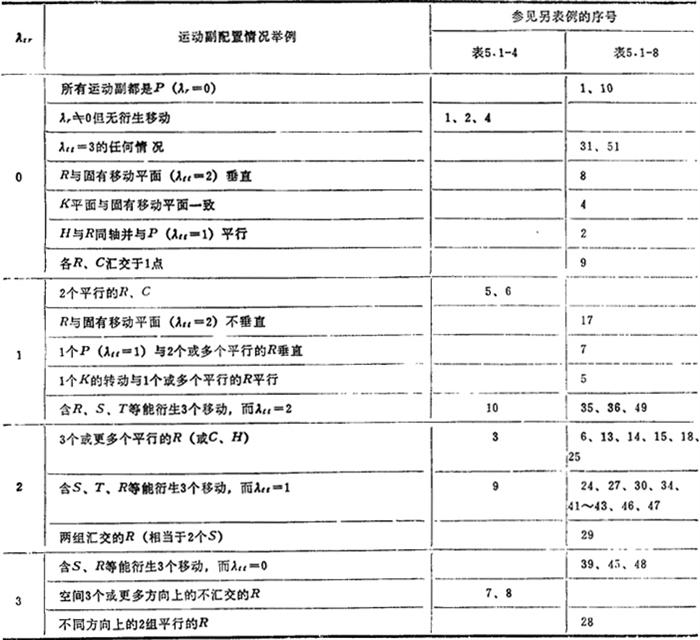
❸ 末杆的衍生附加移动数 由开链中的R、C、S、S′、K、H等的转动所衍生且与固有移动不重复的(附加)移动数。λtr与λtt之和不大于3。使λtr等于0、1、2、3的若干运动副配置情况举例见表5.1-7。
由开链中的R、C、S、S′、K、H等的转动所衍生且与固有移动不重复的(附加)移动数。λtr与λtt之和不大于3。使λtr等于0、1、2、3的若干运动副配置情况举例见表5.1-7。
表5.1-7 末杆衍生附加移动数λtt
- 天津地区白云岩是什么意思
- 天津地区的光能是什么意思
- 天津地区的山地丘陵是什么意思
- 天津地区的暴雨是什么意思
- 天津地区盐生植被是什么意思
- 天津地区草甸植被是什么意思
- 天津地区落叶阔叶林是什么意思
- 天津地区针叶林——侧柏是什么意思
- 天津地区针叶林——油松是什么意思
- 天津地区针阔叶混交林是什么意思
- 天津地区霜冻灾害是什么意思
- 天津地层概况是什么意思
- 天津地方审判厅是什么意思
- 天津地方法院是什么意思
- 天津地毯是什么意思
- 天津地毯进出口公司是什么意思
- 天津地毯进出口公司地毯厂是什么意思
- 天津地表来水量是什么意思
- 天津地质矿产研究所是什么意思
- 天津地面沉降是什么意思
- 天津垒球队是什么意思
- 天津城是什么意思
- 天津城也叫算盘城是什么意思
- 天津城保卫战是什么意思
- 天津城墙是什么意思
- 天津城市历史地图集是什么意思
- 天津城市建设学院是什么意思
- 天津城市建设学院图书馆是什么意思
- 天津城市雕塑是什么意思
- 天津城建集团是什么意思
- 天津城西画会是什么意思
- 天津基督教会仓门口堂是什么意思
- 天津基督教青年会图画特刊是什么意思
- 天津基督教青年会室内篮球场是什么意思
- 天津塑料集团是什么意思
- 天津塘沽京海石化油脂运销中心是什么意思
- 天津塘沽海会是什么意思
- 天津壬子兵变是什么意思
- 天津备济社是什么意思
- 天津外商投资企业协会是什么意思
- 天津外国语学院是什么意思
- 天津外国语学院体育场地是什么意思
- 天津外总集团有限公司是什么意思
- 天津外语师范学校是什么意思
- 天津外轮代理公司是什么意思
- 天津外轮理货公司是什么意思
- 天津外运集装箱储运中心是什么意思
- 天津外运集装箱储运中心码头是什么意思
- 天津大发微型汽车维修手册是什么意思
- 天津大学是什么意思
- 天津大学体育场地是什么意思
- 天津大学冶金分校是什么意思
- 天津大学出版社是什么意思
- 天津大学分析中心是什么意思
- 天津大学化工系统工程研究室是什么意思
- 天津大学图书馆是什么意思
- 天津大学建筑设计研究院是什么意思
- 天津大学自动化学院电力及自动化工程研究所是什么意思
- 天津大学附属中学是什么意思
- 天津大桥集团有限公司是什么意思