旋转矩阵: 设0-xyz为固定坐标系。在杆件上取一点0'作连体参考坐标系0'-ξηζ。固定坐标轴上的单位矢量为i,j,k,参考坐标轴上的单位矢量为f,g,h。于是,旋转矩阵为:
右边第一项表示移动变换,第二项表示转动变换。为了把移动变换和转动变换用矩阵表示,定义4×1矢量
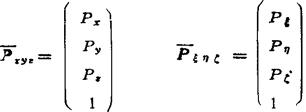
(5.13-3)

于是(5.13-2)式成为

称 xyz为矢量Pxyz的齐次坐标。4×4矩阵T同时表示参考坐标系的位置和方位,称为齐次变换矩阵。齐次变换矩阵可用来表示一个参考坐标系在固定坐标系中的位置和方位;同时表示空间一点在原点不重合时的参考坐标和固定坐标之间的坐标变换关系;又可表示参考坐标系相对于固定坐标系的移动和转动。下面求T的逆:
xyz为矢量Pxyz的齐次坐标。4×4矩阵T同时表示参考坐标系的位置和方位,称为齐次变换矩阵。齐次变换矩阵可用来表示一个参考坐标系在固定坐标系中的位置和方位;同时表示空间一点在原点不重合时的参考坐标和固定坐标之间的坐标变换关系;又可表示参考坐标系相对于固定坐标系的移动和转动。下面求T的逆:
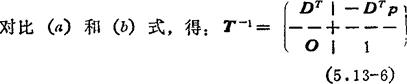
由(5.13-5)式得:Pξηζ=T-1Pxyz (a)
由(5.13-2)式得:Pξηζ=-DTp+DTPxyz (b)
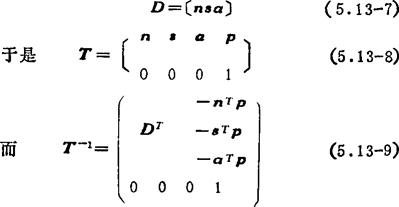
这里T-1 TT。设操作手末端夹持器的参考坐标轴上单位矢量的固定坐标的投影列阵为n、8和a,则
TT。设操作手末端夹持器的参考坐标轴上单位矢量的固定坐标的投影列阵为n、8和a,则
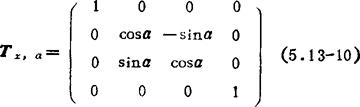
基本齐次变换矩阵:绕x轴转动a角的基本齐次转动矩阵为
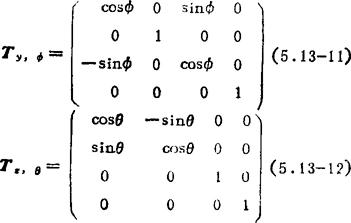
类似,绕y轴转动Φ角和绕z轴转动θ角的转动矩阵为:
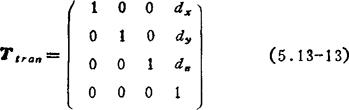
设沿x,y和:轴方向的移动分别为dx、dy和 z,则基本齐次移动矩阵为
z,则基本齐次移动矩阵为
齐次变换矩阵的合成:矩阵合成时必须注意矩阵乘法的次序。设开始时参考坐标系0'-ξηζ和固定坐标系0-xyz是重合的,因此齐次变换矩阵T是4×4的单位矩阵I4。由(5.13-5)式可知,空间一点P的位置坐标在参考坐标系和固定坐标系是相同的。如果参考坐标系连同点P一起绕固定坐标系轴x,y和z移动或转动,则 ξηζ已知,而
ξηζ已知,而 xyz是未知的。例如参考坐标和点P先绕x轴转a角,再沿z轴移动d,则合成的齐次变换矩阵为
xyz是未知的。例如参考坐标和点P先绕x轴转a角,再沿z轴移动d,则合成的齐次变换矩阵为
如果固定坐标系连同P点一起绕参考坐标系轴ξ,η和ζ移动或转动,则 已知,而
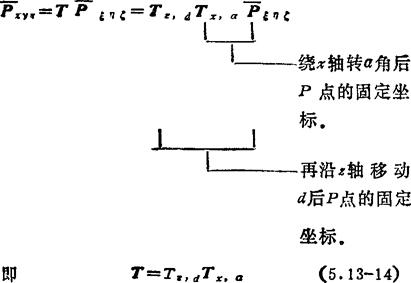
已知,而 是未知的。例如固定坐标和点P绕ξ轴转a角,沿ζ轴移动d.则P点在参考坐标系中的位置依次变换为
是未知的。例如固定坐标和点P绕ξ轴转a角,沿ζ轴移动d.则P点在参考坐标系中的位置依次变换为
 ——绕ξ轴转a角后P点的参考坐标。
——绕ξ轴转a角后P点的参考坐标。
 ——再沿ζ轴移动d后P点的参考坐标。
——再沿ζ轴移动d后P点的参考坐标。

相应的基本齐次变换矩阵右乘原来的齐次变换矩阵。
基本齐次变换矩阵Tx,a和 .a、
.a、 ,d和Tζ,完全相同,但因乘法次序不同其意义也跟著不同。
,d和Tζ,完全相同,但因乘法次序不同其意义也跟著不同。
- 日本法院组织是什么意思
- 日本泡沫经济破灭是什么意思
- 日本津贴制度是什么意思
- 日本浓尾地震是什么意思
- 日本海是什么意思
- 日本海上保安厅是什么意思
- 日本海上警备队是什么意思
- 日本海事检验协会是什么意思
- 日本海军陆战队登陆碑是什么意思
- 日本海外新闻普及株式会社是什么意思
- 日本海外经济协力基金是什么意思
- 日本海外经济协力基金法是什么意思
- 日本海棠是什么意思
- 日本海沟是什么意思
- 日本海洋气象学之父是什么意思
- 日本海流是什么意思
- 日本消费税是什么意思
- 日本消费者信息中心是什么意思
- 日本消费者协会是什么意思
- 日本消费者联盟是什么意思
- 日本渔业协同组合是什么意思
- 日本游客是什么意思
- 日本源流考是什么意思
- 日本漫话是什么意思
- 日本灌溉是什么意思
- 日本火山群是什么意思
- 日本灯词是什么意思
- [日本] 片山哲《共渡危机——就职演说》是什么意思
- 日本特别国会是什么意思
- 日本特别委员会是什么意思
- 日本犯罪人预防更生法是什么意思
- 日本玉川大学蜜蜂科学研究所是什么意思
- 日本环境卫生金融公库是什么意思
- 日本环境污染标准分析法手册是什么意思
- 日本现代人名地名表是什么意思
- 日本现代人物传是什么意思
- 日本现代史是什么意思
- 日本现代语辞典是什么意思
- 日本现代题材电影的头号明星是什么意思
- 日本现行学制是什么意思
- 日本理学的兴盛是什么意思
- 日本生产性本部是什么意思
- 日本生命保险公司是什么意思
- 日本生命保险协会是什么意思
- 日本生命保险相互会社是什么意思
- 日本生物系特定产业技术研究推进机构,农业机械化研究所是什么意思
- 日本田中内阁侵略满蒙之积极政策是什么意思
- 日本电力系统是什么意思
- 日本电气是什么意思
- 日本电气公司是什么意思
- 日本电视台是什么意思
- 日本电视广播网公司是什么意思
- 日本电镀指南是什么意思
- 日本男子体操运动员自选动作图解是什么意思
- 日本男子体操队技术图解是什么意思
- 日本男子竞技体操是什么意思
- 日本画圣是什么意思
- 日本番薯是什么意思
- 日本疆域险要是什么意思
- 日本登山家在麦金利峰遇难是什么意思