按给定的主动杆与从动杆转角间的函数关系设计空间四杆机构,在方法上与设计平面四杆机构相似。现以已经预先选定a4的RSSR四杆机构为例,为了增多可供设计的机构参数,可引进输入初始角φ0(也可同时引进输出初始角ψ0)。在式(5.5-3)中,以θ1=φ0+φt和θ3=ψj代入,并重新整理成如下形式:
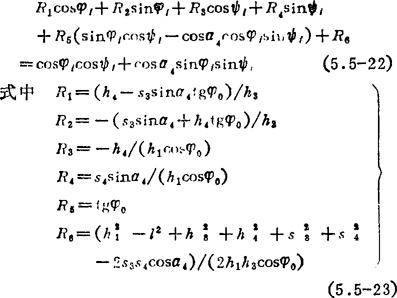
式(5.5-22)作为机构设计方程式来说,有六个未知量R1、R2、……R6,所以按预定的函数关系设计时,可以选取六个插值点来精确实现六组输入输出值φj、ψj(i=1,2,……6)。将这些输入输出值代入式(5.5-22)可得六个线性方程式,把未知量R1、R2、……R6解出后,再利用式(5.5-23)便可求出下列设计参数:
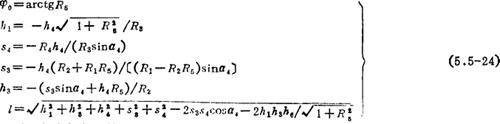
以上各式中,h4可以取为1或其它合适的数值。
附录 空间连杆机构运动分析有关专著
1.张启先编著 空间机构的分析与综合北京机械工业出版社1984
2.黄真编著,空间机械学,北京机械工业出版社,1991年
3.牧野洋著 自动机械机构学,东京日刊工业新闻社.1976年
4.J.Denavit,R.S.Hartenberg,A Kinematic Notation for Lower Pair MeChanisms Based On Matrices,Trans,ASME(E),Vol.77,No.2,1955,Pp.215~221.
5.R.S.Hartenberg,J.Denavit.Kinematic Syn thesis of Linkages,Mc Graw-Hill,1964,
6.J.Denavit.Displacement Analy sis of Mechanisms Based on 2×2 Matrices of Dual Numbers.VDl Berichte.Bd 29,1958,Pp.81~89.
7.A.T.Yang,F.Freudenstein,Application of Dual Number Quaternion Algebra to the Analysis of Spatial Mechanisms,Trans.ASME(E),Vo1.86,No.2,1964,pP.300~308.
8.G.R.Veldkamp.On the Use of Dual Numbers,Vectors and Matrices in Instantaneous SpatiCal Kinematics,MMT.Vo1.11,No.2.1976,PP.141~156.
9.K.H.Hunt,Screw Axes and Mobility in Spatial Mechanisms via the Linear Comoplex,J.Mech,Vo1.2,No.3,1967,pp307-327.
10.Φ.M.диMeнTбepг,Общий MeToд иccлeдoBaния Кoнeчных ПepeMeщeний ПpocTpaнCTBeнныХ MeхaHи3Mов и НeкoTopыe слHчaH лaCCивыX cвя3eй,Tpyды ceMиHap TMM,ToM5,Выn.17,1948,CTp.5~39。
- 吉相是什么意思
- 吉石是什么意思
- 吉石盦丛书是什么意思
- 吉礼是什么意思
- 吉祝是什么意思
- 吉神是什么意思
- 吉祥是什么意思
- 吉祥不止是什么意思
- 吉祥与妖异是什么意思
- 吉祥丸是什么意思
- 吉祥之云气是什么意思
- 吉祥之星高高照临是什么意思
- 吉祥亨通是什么意思
- 吉祥兆是什么意思
- 吉祥兴盛是什么意思
- 吉祥包是什么意思
- 吉祥号是什么意思
- 吉祥和不吉祥是什么意思
- 吉祥和睦是什么意思
- 吉祥善事是什么意思
- 吉祥喜庆是什么意思
- 吉祥喜庆的事有很多是什么意思
- 吉祥图案是什么意思
- 吉祥塔是什么意思
- 吉祥大饭店是什么意思
- 吉祥天图壁画是什么意思
- 吉祥天女是什么意思
- 吉祥天女壁画是什么意思
- 吉祥太平是什么意思
- 吉祥如意是什么意思
- 吉祥如流水不断是什么意思
- 吉祥姥姥是什么意思
- 吉祥安乐是什么意思
- 吉祥安定是什么意思
- 吉祥安泰是什么意思
- 吉祥安顺是什么意思
- 吉祥寺是什么意思
- 吉祥寺赏牡丹 - 苏轼是什么意思
- 吉祥巷同仁里8—13号民居建筑群是什么意思
- 吉祥幸福是什么意思
- 吉祥幸运是什么意思
- 吉祥床是什么意思
- 吉祥形是什么意思
- 吉祥所是什么意思
- 吉祥数字定价是什么意思
- 吉祥旺盛是什么意思
- 吉祥杵是什么意思
- 吉祥板是什么意思
- 吉祥果是什么意思
- 吉祥楼是什么意思
- 吉祥止止是什么意思
- 吉祥止止斋是什么意思
- 吉祥海云是什么意思
- 吉祥海雲是什么意思
- 吉祥涌洋行是什么意思
- 吉祥点是什么意思
- 吉祥物是什么意思
- 吉祥班是什么意思
- 吉祥痣是什么意思
- 吉祥的事是什么意思