线弹性结构小变形位移有限单元法的理论基础.是弹性理论和最小势能原理(或虚功原理)。
最小势能原理:在满足给定位移边界条件的所有位移中,只有满足平衡方程和面力边界条件的位移,可使弹性体的总势能π取极小值。
π=U-W (1.3-75)
式中 弹性体应变势能
❷ 在各个单元内,通过插值方法,将位移矢量{u}用1单元节点位移矢量{q}近似表示,即
{u}=〔H〕{q} (1.3-77)
其中,〔H〕是插值函数矩阵。
再根据应变位移关系,得到应变矢量{ε}与单元节点位移矢量{q}的关系
{ε}=〔L〕{u}=〔L〕〔H〕{q}=〔B〕{q}
(1.3-78)
其中,〔L〕为弹性理论的应变位移关系式中微分算符矩阵,〔B〕=〔L〕〔H〕为应变矩阵。
❸ 计算单元势能пe,求单刚矩阵〔k〕和单载矢量{Q}:
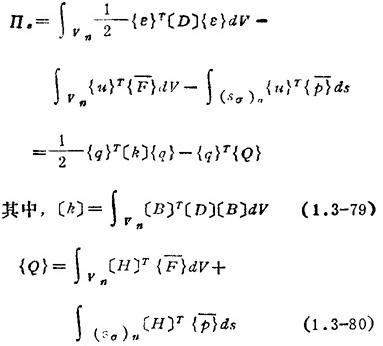
❹ 计算弹性体总势能Π:
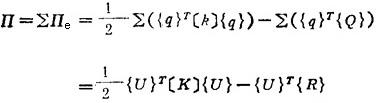
组集单刚矩阵和单载矢量成总刚矩阵〔K〕和总载矢量{R},其中{U}是总体节点位移矢量。
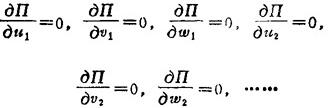
❺ 根据弹性体总势能Π的极值条件,得到总体刚度方程组。
弹性体总势能Π是各个节点位移分量u1、v1、ω1、u2、v2、ω2、……的多元函数,其极值条件是:
用矩阵形式表示为:
〔K〕{U}-{R}=0或〔K〕{U}={R}
(1.3-81)
❻ 根据给定位移边界条件修正总体刚度方程〔K〕{U}={R},求解得到总体节点位移矢量{U}。
❼ 由已知单元节点位移矢量{q},求单元应力:
{σ}=〔D〕{ε}=〔D〕〔B〕{q}=〔S〕{q}
(1.3-82)
其中 〔S〕=〔D〕〔B〕是应力矩阵。
如果用虚功原理来推导有限元方程,结果相同,仅上述第❸ 、❹ 、❺ 步略有不同,即
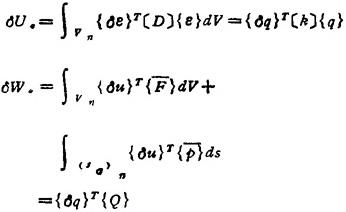
第❸ 步计算单元虚应变能dUe和虚功δVe。得到单刚矩阵〔k〕和单载矢量{Q}
第❹ 步计算弹性体总虚应变能dU和总虚功δW,组集成总刚矩阵〔K〕和总载矢量{R}
δU=∑(δU.)=∑({δq}T〔k〕{δq})={δU}T〔K〕{U}
dW=∑(δWe)=∑({δq}T{Q})={δU}T{R}
第❺ 步由虚功方程δU=dW,得总体刚度方程组
{dU}T〔K〕{U}={δU}T{R}
由于总体虚位移矢量{δU}是任意的非零矢量,上式可写成:
〔K〕{U}={R}
- 春添是什么意思
- 春渚纪闻是什么意思
- 春渚纪闻是什么意思
- 春渚纪闻是什么意思
- 春渚纪闻是什么意思
- 春渚纪闻是什么意思
- 春温是什么意思
- 春温是什么意思
- 春温三字诀是什么意思
- 春温集方一卷 清 赵为干是什么意思
- 春游图是什么意思
- 春游歌是什么意思
- 春游诗轴是什么意思
- 春满人间是什么意思
- 春满芳林红渐老,寒凝新草绿初肥。是什么意思
- 春潭浴乱星。是什么意思
- 春潮是什么意思
- 春潮不管天涯恨,更卷西兴暮雨来。是什么意思
- 春潮在望是什么意思
- 春潮带雨晚来急,野渡无人舟自横是什么意思
- 春潮带雨晚来急,野渡无人舟自横。是什么意思
- 春潮急是什么意思
- 春灯谜是什么意思
- 春灯谜是什么意思
- 春灯谜·薛宝钗是什么意思
- 春灯谜·贾元春是什么意思
- 春灯谜·贾惜春是什么意思
- 春灯谜·贾探春是什么意思
- 春灯谜·贾政是什么意思
- 春灯谜·贾母是什么意思
- 春灯谜·贾环是什么意思
- 春灯谜·贾迎春是什么意思
- 春灯谜八首是什么意思
- 春灯迷史是什么意思
- 春灯闹是什么意思
- 春灯闹是什么意思
- 春煌是什么意思
- 春燕是什么意思
- 春燕豫剧团是什么意思
- 春牛是什么意思
- 春牛是什么意思
- 春牛图是什么意思
- 春王正月是什么意思
- 春王正月考是什么意思
- 春琼是什么意思
- 春用杂交种性状与饲养特点是什么意思
- 春用蚕品种是什么意思
- 春用蚕品种是什么意思
- 春田一览 明 房文实是什么意思
- 春申之死是什么意思
- 春申刎首是什么意思
- 春申君是什么意思
- 春申君是什么意思
- 春申君合纵伐秦是什么意思
- 春申服装厂是什么意思
- 春画是什么意思
- 春的消息是什么意思
- 春皋宜晚景,芳树杂流霞。是什么意思
- 春盘面是什么意思
- 春眠不觉晓,处处闻啼鸟是什么意思