(Jacobian)
操作手运动学的正问题和逆问题,从正反二方面研究了关节状态矢量与末端装置的位置与方位之间的关系。在运动控制中,尚需确定关节的无穷小运动在末端装置位置与方位无穷小变化之间的关系。在无穷小关节运动与无穷小末端装置运动之间存在一线性关系。这一关系可用雅可比矩阵定义。若设末端装置的微小移动和微小转动为d和δ,则
j关节转动对末端装置角速度Ω的奉献为

(5.13-43)
总起来,如果j关节为转动关节,则


由于关节2和3的轴是平行的,可用1A3=1A22A3代替1A3和 ,故需要计算的矩阵为:
,故需要计算的矩阵为:

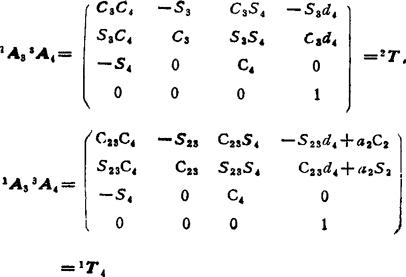

从以上各式中即可得到式(5.13-53)和(5.13-54)的各变量。因为

由(5.13-53)式计算操作手雅可比矩阵各列,得
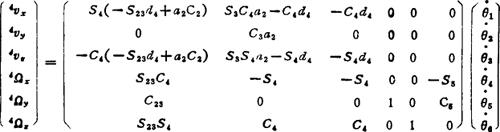
雅可比矩阵元素中有重复项,上式等价于
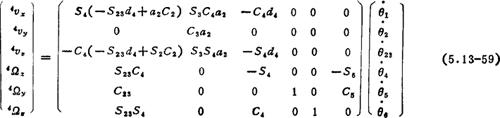
式中θ23=θ2+θ3。由(5.13-57)式计算4n、4a4a和4p,得
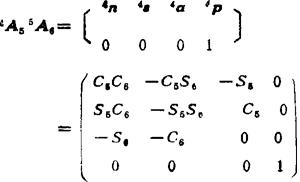
由(5.13-56)式得

6vy=-C5S64v2-S5S64vy-C64v2
6v2=-S54vx+C54vy
6Ωx=C5C64Ω2+S5C64Ωy-S64Ω2
6Ωy=-C5S6'Ω2-S5S64Ωy-C64Ω2
6Ω2=-S54Ωx+C54Ωy
计算4J只需11次乘法运算和3次加法运算;求4v和4Ω需要16次乘法运算和12次加法运算;求6v和6Ω需要20次乘法运算和10次加法运算。总数分别为47次和25次。
- 胡中雄是什么意思
- 胡丰是什么意思
- 胡丹沸是什么意思
- 胡为是什么意思
- 胡为是什么意思
- 胡为乎株林,从夏南是什么意思
- 胡为乎泥中是什么意思
- 胡为林是什么意思
- 胡为民是什么意思
- 胡为真是什么意思
- 胡乃玲是什么意思
- 胡义宾是什么意思
- 胡义宾是什么意思
- 胡义宾是什么意思
- 胡义赞是什么意思
- 胡之璧是什么意思
- 胡乔木是什么意思
- 胡乔木是什么意思
- 胡乔木是什么意思
- 胡乔木是什么意思
- 胡乔木(1912—1992)是什么意思
- 胡乔木文集是什么意思
- 胡乔木文集(第一卷)是什么意思
- 胡也频是什么意思
- 胡也频是什么意思
- 胡也频是什么意思
- 胡也频是什么意思
- 胡也频是什么意思
- 胡也频是什么意思
- 胡也频是什么意思
- 胡也频(1903—1931)是什么意思
- 胡也频小说选集是什么意思
- 胡也频选集是什么意思
- 胡书城是什么意思
- 胡书林是什么意思
- 胡乾善是什么意思
- 胡云樵是什么意思
- 胡云生是什么意思
- 胡云翼是什么意思
- 胡云翼是什么意思
- 胡云翼是什么意思
- 胡云翼是什么意思
- 胡亚基是什么意思
- 胡亚文是什么意思
- 胡亚民是什么意思
- 胡亚民是什么意思
- 胡亚雷斯(Benito Pablo Jurez, 1806—1872)是什么意思
- 胡亚雷斯城(Ciudad Jurez)是什么意思
- 胡亥是什么意思
- 胡亥是什么意思
- 胡亥亡秦是什么意思
- 胡亮天是什么意思
- 胡人同是什么意思
- 胡什哈尔·哈塔克(Khushhal Khattak, 约1613—约1689)是什么意思
- 胡什恰是什么意思
- 胡仁原是什么意思
- 胡仁宇是什么意思
- 胡仁宇是什么意思
- 胡仁源是什么意思
- 胡仇是什么意思