果园机械orchard machiety
果树生产过程中使用的机具与装备。主要包括:果园动力、建园、栽植、耕作、施肥、中耕、灌溉、植保、防护自然灾害、整形修剪以及采收等作业的机具和装备。世界上一些工业发达国家, 果树生产机械化发展迅速, 美国在20世纪40年代, 基本实现果树生产机械化, 70年代以来, 除果品采收和部分细致修剪, 仍使用人工作业外, 果园其他主要作业项目, 都实现了机械化; 在欧洲, 一些国家的葡萄生产全过程, 已实现机械化。
中国从20世纪50年代开始, 果树生产中使用半机械化生产机具, 60年代发展了半机械化的小型机动喷雾机; 手扶拖拉机和中、小型轮式拖拉机应用于果树生产。同时, 研制改进了中耕机、施肥机、开沟机等。70年代末, 开始研制果树定植挖坑机, 果园风送式喷雾机, 果树行间动力割草机, 修剪、采收用升降平台,液压修枝剪, 震动式山楂采收机, 静电喷雾机, 葡萄园喷雾机, 绿肥压青机, 施肥开沟机, 倒置式树盘中耕机等。
动力机械 20世纪40年代,果园机械主要有,用于配带各种作业机具的手扶拖拉机和园艺拖拉机(Gar-den Trater)。60~70年代, 发展了果园型拖拉机,根据果园作业的特殊性, 形体小, 功率为30~50马力,采用折腰转向机构, 前后轮驱动,可以提高附着重量,改善牵引附着性能, 具有良好的机动性, 通过性。除后侧能牵引或悬挂机具外,还能牵引或悬挂偏置机具,进行树干周围的除草及耕耘作业。拖拉机的前部与中部,也能装置机具, 提高了对果园多种作业的适应性。70年代后期, 根据葡萄生产机械化的需要, 发展了高低架葡萄园专用型拖拉机,用于立架栽培的葡萄生产,其农机底隙达2米左右, 拖拉机跨在葡萄植株上, 进行各项管理、采收、集运作业, 此类拖拉机的传动系统结构, 除机械传动外, 还采用了液压马达。
建园机械 包括用于清理场地、修筑梯田、平整园地、修建道路和开挖排灌渠道等作业的通用土建机械, 如推土机、铲运机、平地机、筑埂机、挖沟机等,以及由拖拉机配带果园用的耕翻和挖穴栽植机具。
挖坑机 果树树种不同, 要求成穴的大小和深浅不一, 挖坑机种类有: ❶手提机动型。以2~3马力小型汽油机为动力, 配置手把,并安装有立式螺旋钻头,作业时以单人或双人手提操作, 由于机具较轻, 钻头直径小,适于坡地上葡萄和杂果类果树定植挖坑用;
❷悬挂式挖坑机。本身不配置动力,是由齿箱通过接盘,装置立式单螺旋或双螺旋转头, 整个装置悬挂于拖拉机上, 由拖拉机动力输出轴驱动齿箱带动钻头旋转入土而成穴, 一般成穴深度可达80~100厘米,直径可使用不同大小钻头(50~100厘米)。此机械可满足各种果树的定植挖坑要求(图1)。
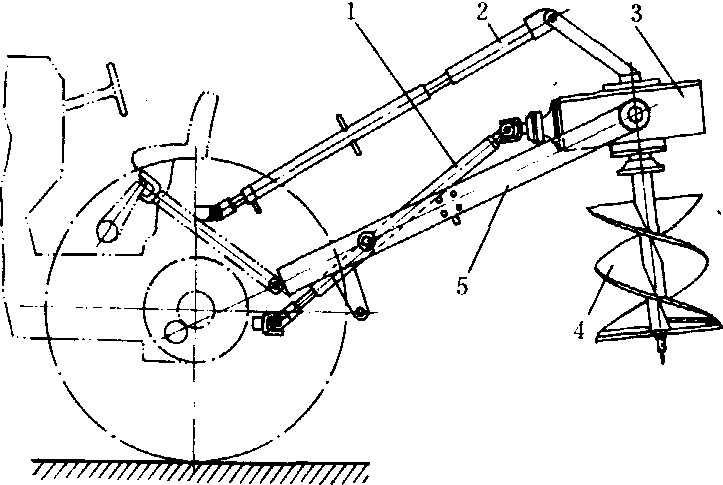
图 1 挖坑机
1. 传动轴; 2. 上拉杆; 3. 减速箱; 4. 钻头; 5. 机架
果树栽植机械 通常有: ❶人工投苗植树机。由机械开沟或挖穴, 人工投苗、培土、压实进行栽植;
❷半机械化栽植机。由机器开沟, 人工投苗, 再用镇压轮将苗根压实, 用覆土板覆土;
❸机械化栽植机。由拖拉机牵引开沟、投苗、镇压和覆土等各项作业一次完成。机械化栽植机的栽植装置有链轨式和转盘式,其结构主要由3部分组成: 夹持苗木的夹苗器; 带动夹苗器的传动装置; 使夹苗器按规定位置夹紧和松开的装置, 与开沟器、镇压器、覆土器共同组成一台机械化栽植机(图2)。
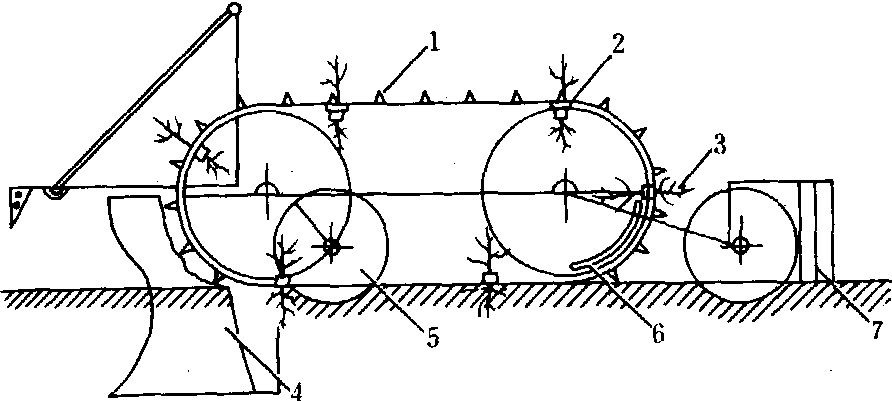
图 2 链轨式栽植装置1. 链轨; 2. 夹苗器; 3. 放苗台; 4. 开沟器5. 镇压器; 6. 滑道; 7. 耙齿
果园管理机械 果园管理机械, 包括果树行间和株间耕作、施肥、中耕除草、病虫害防治、防鸟兽害、防霜冻、整形修剪等项主要作业的机具。
耕作机械 采用通用型的牵引或悬挂犁、耙、旋耕机, 进行果树行间耕翻整地。
施肥机械 沟施使用开沟机开沟,再施入肥料、覆土; 撒施使用各种型号的撒施机, 将肥料撒布于果树行间, 再用犁耕翻。葡萄施肥机,多采用开沟施肥机,开沟、施肥、覆土等工序一次完成。
中耕除草机械 果树的中耕除草, 分行间除草和树盘除草。行间中耕除草机械, 有悬挂式铲翼形中耕机、旋耕机。生草制果园, 则多采用刈草机。有圆盘型、往复刀片型和甩刀型。此外, 尚有卧式螺旋型刈草装置。树盘和株间的中耕除草机械, 除采用上述各种工作部件外, 尚须加设安全避让装置, 有全机械式和传感式等, 工作部件多为侧置(偏置), 当拖拉机行驶在果树行间作业时, 中耕除草工作部件可伸入到树下, 以除去树干周围的杂草,安全装置触到树干时,使工作部件回转一个角度, 避开树干, 通过树干后, 又回复到原工作位置, 继续工作(图3)。
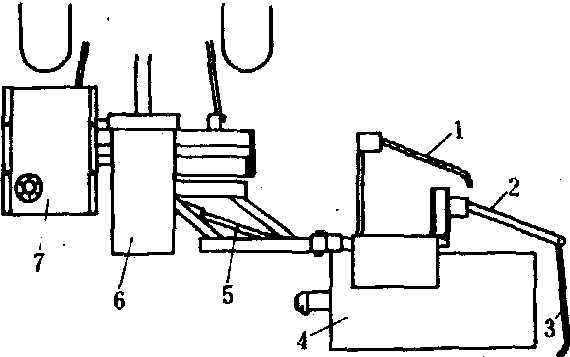
图 3 中耕机自动避让装置
1、2、3. 传感器; 4. 旋耕机; 5. 油杆; 6. 油泵; 7. 油箱
植保机械和装置 包括果树病虫害防治, 以及防鸟兽、防霜冻等的机具或装置。❶喷雾机械。在20世纪20~30年代, 采用的是单管压缩式, 或柱塞式喷雾器, 以及手摇式喷粉器; 30年代以后,发展了小型单缸机动喷雾机。40~50年代, 发展了双缸和三缸的柱塞或活塞式动力喷雾机, 但仍须人工操作喷洒。60年代以来, 果园型喷雾机, 以风送型为多, 有小型机动背负式、拖拉机牵引式(图4)、或悬挂式和自走式。风送喷雾机(图5)是当前世界上在果园中发展快、应用最广泛的机型。其工作原理, 是通过动力驱动风机和液泵工作,药箱中的药液经输液管进入药液泵, 在泵的作用下, 通过调压阀, 使受到一定压力的药液, 一部分经回水管进入药箱, 通过搅拌装置进行搅拌, 一部分进入喷洒装置, 在压力(一般10千克/厘米2)作用下由喷头喷出, 形成雾化, 在风机高速气流吹送下, 对一次雾化了的雾滴进行第二次雾化, 细小的雾粒被均匀地吹送到树体上, 同时,高速气流形成一定涡流,将果树较细枝条和叶片翻动, 从而使药液雾滴均匀覆盖于枝、叶和果实的表面。
❷防霜害装置。利用燃烧燃料产生热体,使果园气温上升,以防止霜冻。使用较多的是反射烟囱式柴油加温器,每台燃油消耗量为1.5~4升/小时, 每公顷果园须设置100~200台, 标准耗油量为300升/公顷小时。此外, 尚有通过喷油嘴燃烧柴油的油压式加温器, 以液态丙烷为燃料的加温器。还有以柴油为主剂的固体燃料, 一块1.5千克的固体燃料, 可以连续燃烧4小时,每公顷需300~350个火点;防霜冻空气加温装置, 实际上是一种风机, 由于离地面10米左右的空气温度比地面高, 风机的作用是通过搅动气流, 把上层的暖空气吹向地面, 以达到防霜目的。大部分风机装于10米高处,螺旋浆直径为4~5米,一般由60~80马力发动机驱动, 在对流强度为2.5℃时, 此时风机可使果园气温上升1.1℃,其工作有效面积约为1.5公顷, 对流强度为5℃时, 则为3.4公顷,采用双向风机, 其作用面积为8.1公顷。
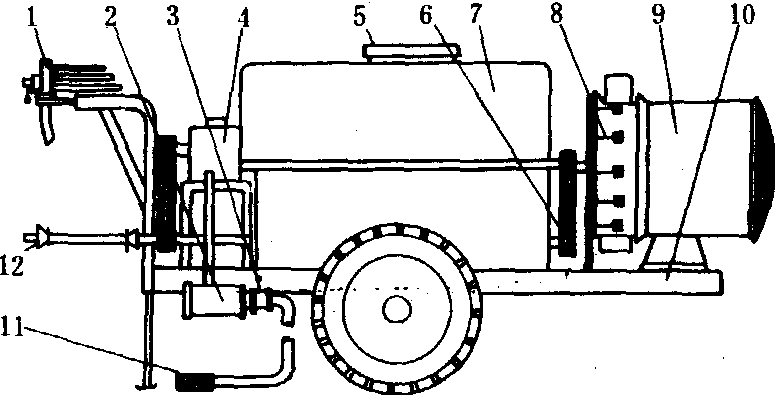
图 4 牵引式果园喷雾机示意图
1. 调节分配阀; 2. 过滤器; 3. 吸水阀;4. 液泵; 5. 药箱盖; 6. 皮带轮; 7. 药箱; 8. 喷洒装置; 9. 轴流风机; 10. 底盘; 11. 吸水头; 12. 万向节
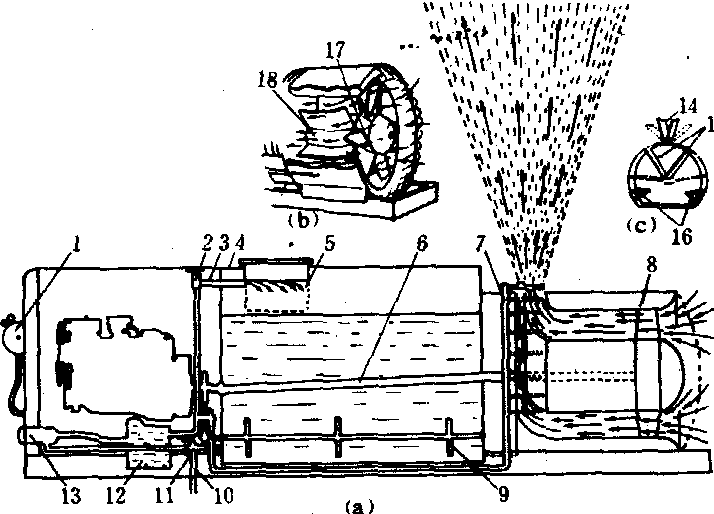
图 5 风送喷雾机的结构和工作原理
(a) 机器纵面剖视; (b) 轴流风机; (c) 导向板结构
1. 发动机节流阀和喷雾控制装置; 2. 调压阀; 3. 回水支管; 4. 导向板结构; 5. 滤网; 6. 传动轴; 7. 输液管和喷嘴; 8. 风机; 9. 搅拌器; 10. 加药吸液管; 11. 三通阀; 12. 液泵; 13. 过滤器; 14. 外导风板;15. 内导风板; 16. 下侧导风板;17. 叶轮;18. 定叶片
修剪机械 果树的整形、修剪机具。20世纪40~50年代, 开始应用于手持的圆盘型、链条型气动、液压或电动驱动的修剪锯。美国从20世纪50年代, 开始研制机械化修剪, 到70年代后期, 普及推广了机械化修剪。修剪机的主要部件,是圆盘式和往复刀片式,多装置于拖拉机上, 也有自装动力的专用修剪机, 以液压马达驱动, 用于几何形果树的外形整形。圆盘形修剪机, 是采用圆盘式切割器, 有光刃圆盘刀、锯齿圆盘刀和三角回转刀等型式。美国的圆盘修剪机, 以45马力拖拉机带动, 其修剪部分为2个高6.6米的立臂,每个立臂上装有7个圆盘刀, 圆盘刀直径为350毫米,立臂夹角可调节,刀架升降由液压机构完成, 作业时液压马达驱动圆盘锯,转速为600转/分,机组行进时, 旋转着的圆盘锯, 将阻碍机组通过的枝条切除, 得到要求的树形。往复刀片型修剪机, 只是把圆盘切割器部分改装为往复刀片装置,作业方法相同(图6)
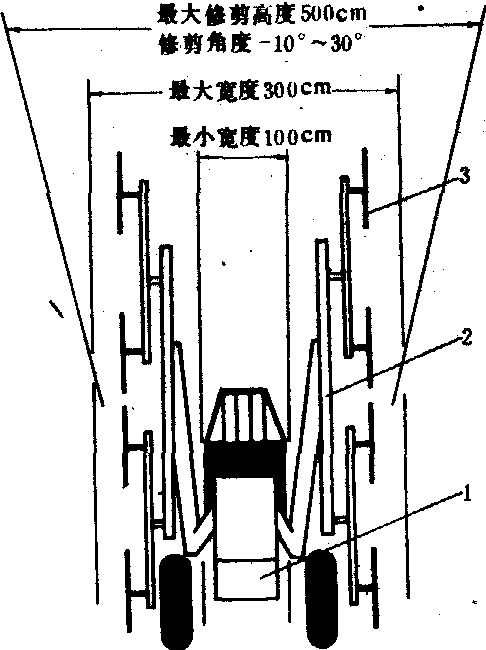
图6 圆盘形修剪机示意图 。
1.拖拉机; 2.连动臂; 3. 圆形锯片
果品采后处理机械装置
收获机械 半机械化采收, 是利用升降平台, 人工手摘。手动采果工具——充气胶钳, 是将摘果囊托住果实, 用手压紧空气胶囊, 囊内气体通过管路进入摘果囊, 由于囊内气压增加; 而抓紧果实, 由人工将果实摘下。此外, 尚有摘果袋、网、都装有较长的杆把, 可以采摘较高处的果实。
20世纪60~70年代, 一些发达国家研制了机械化采收装置, 有机械式和气动振动器。振(摇)动采收机的工作原理, 是由曲柄连杆振动器或惯性振动器作为振动源, 产生振动, 通过传动杆和夹树器, 把振动传给树体, 使果树受振,当惯性力大于果实脱落阻力时,果实被振落,再通过收集器, 收集装箱。振动采收机,一般功率为30马力左右, 振动频率900~1200次/分,振幅18~45毫米,机械采收, 可提高劳动生产率4~11倍, 但果实损伤较大, 多用于加工用果品, 或坚果类果品的采收。中国在20世纪80年代初, 研制了振动式山楂采收机, 由12马力手扶拖拉机配套驱动, 有较好的采收效果(图7)。
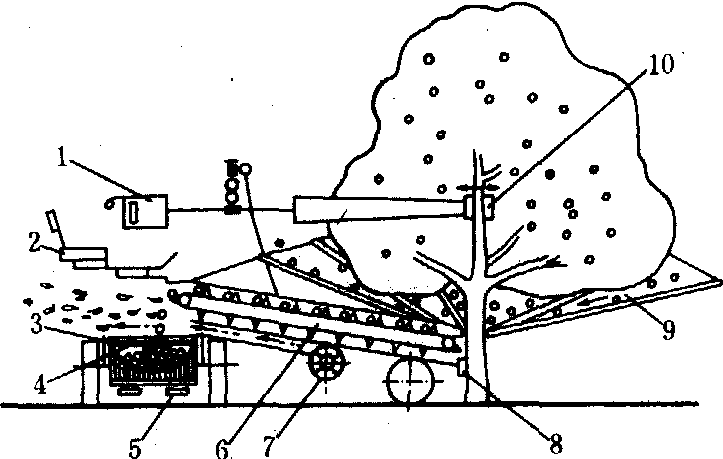
图 7 振动式采收机作业示意图
1. 推摇器; 2. 座位; 3. 运载车箱; 4. 限制器;5. 支撑架;6. 输送装置; 7. 风扇; 8. 固定支9. 接载装置; 10. 夹持器
为了捡拾地面果实, 20世纪60年代以来, 研制了地面果实捡拾机, 有气吸式、滚针式和机械式。
果品分选(级)装置 最简易的分级器是分级孔板, 以孔板上不同大小的孔径来分选果品, 纯系手工劳动。果品分选机械化的历史不长, 但发展迅速, 机械化程度高。普遍采用的装置有按果品形状的大小分级; 按果品重量分级; 按色泽分级(见果实分级)3种:❶按果实形状(大小)分级。利用机械使果实通过具有不同尺寸的选果工作部件, 依次选出不同果径级别的果实。
❷按重量分级。利用杠杆平衡原理, 在杠杆一端放有平衡重或计量装置。另一端放盛果部件, 当盛果部件上的果实重量超过平衡重时, 杠杆倾斜抛出果实, 承载较轻果实时,杠杆越过此平衡重位置前移,当遇到较轻平衡重时, 杠杆才倾斜, 盛果部件在新的位置抛出较轻果实,由此, 将果实分为若干等级。当前,这种装置使用广泛, 有些装置中的计量器已采用电子秤。
❸按色泽分级。原理是果实从电子发光点前通过时, 果实的反射光, 被能测定波长的光电管接收, 果实色泽不同时, 其反射光的波长就不同, 电子系统可根据波长进行分析, 按对果实色泽的标准要求确定取舍, 达到分级目的。
为了满足果品分选要求, 欧美一些国家, 已开始按多种分选原理制成组合式分选装置, 它可使某一等级的果实达到一定大小和重量标准, 又满足一定的色泽要求。目前, 分选技术和装置,已将光电测试技术、电子计算机和自动控制技术,运用于果品分选装置中。
果品包装装置(见果品包装)。
- 暂住证是什么意思
- 暂停是什么意思
- 暂定是什么意思
- 暂时是什么意思
- 暂用是什么意思
- 暂短是什么意思
- 暂缓是什么意思
- 暂缺是什么意思
- 暂行是什么意思
- 暄是什么意思
- 暄腾是什么意思
- 暅是什么意思
- 暇是什么意思
- 暇时是什么意思
- 暌是什么意思
- 暌别是什么意思
- 暌离是什么意思
- 暌违是什么意思
- 暌隔是什么意思
- 暑是什么意思
- 暑伏是什么意思
- 暑假是什么意思
- 暑天是什么意思
- 暑期是什么意思
- 暑气是什么意思
- 暑热是什么意思
- 暑运是什么意思
- 暕是什么意思
- 暖是什么意思
- 暖乎乎是什么意思
- 暖冬是什么意思
- 暖呼呼是什么意思
- 暖和是什么意思
- 暖壶是什么意思
- 暖寿是什么意思
- 长途是什么意思
- 长途台是什么意思
- 长途电话是什么意思
- 长途跋涉是什么意思
- 长逝是什么意思
- 长销是什么意思
- 长镜头是什么意思
- 长长是什么意思
- 长长短短是什么意思
- 长门是什么意思
- 长队是什么意思
- 长陵是什么意思
- 长青是什么意思
- 长项是什么意思
- 长颈鹿是什么意思
- 长风破浪是什么意思
- 长驱是什么意思
- 长驱直入是什么意思
- 长驱直进是什么意思
- 长鸣是什么意思
- 长鼓是什么意思
- 长龙是什么意思
- 閟是什么意思
- 门是什么意思
- 门丁是什么意思